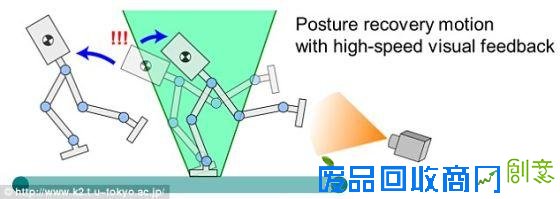
近日,日本科学家研制了一款名为 Achires 的两足机器人,它是利用一台高速摄像机对场景经行辨别,能够实现前倾轻微俯身奔跑而不会跌倒。 Achires 腿长140mm,奔跑的时速可达4.2公里,频率达到每秒能跑6步。在行走过程中还能够进行起跳动作,跳起的同时可以双脚收起并在空中进行后空翻。以往设计的双足机器人都是依靠一个名叫“零动作点“的位置来保持平衡。而这款 Achires 机器人则采用了创新性的设计,利用一个马达和一台高速摄像机来控制身体平衡,前倾、奔跑和空翻等高难度动作都得以实现。

据研究人员介绍:“利用高速摄像头拍摄到的画面进行反馈, 高速奔跑被视为我们研究中的一个里程碑。”不过这机器人还有很多问题需要攻克,如一次只能奔跑10秒左右,研发团队将不断改进尽量提高它的奔跑时间。

该团队之前还研制过另一款机器人 janken ,它是利用摄像头来检测我们的手部动作,并在剪刀石头布中战胜全部的人类对手。而这两款机器人都是采用了一样的技术原理,基于摄像头的高速识别系统,未来利用该技术将有望制造出更加高速的装配机器人,减轻工厂对安装工人的依赖。